
Các loài động vật thường sử dụng cùng một bộ phận cơ thể cho nhiều hình thức di chuyển khác nhau, như chim dùng chân sau để đi bộ, nhảy, bật cao và hỗ trợ cất cánh. Điều này đã truyền cảm hứng cho các kỹ sư trong việc phát triển các robot bay.
Tuy nhiên, việc tạo ra một hệ thống có khả năng di chuyển đa dạng như vậy luôn là thách thức, bởi nó làm tăng độ phức tạp và trọng lượng, khiến khả năng bay kém hiệu quả hơn.
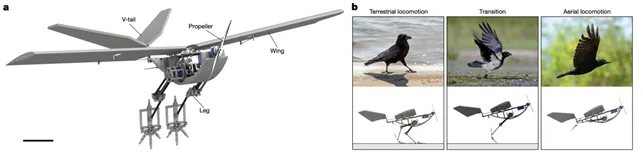
Robot Raven cất cánh giống với loài chim. - Ảnh: Independent.
Robot mới mang tên Raven, viết tắt của “Phương tiện lấy cảm hứng từ chim để hoạt động trong nhiều môi trường”, đã vượt qua một số thách thức này. Nó được thiết kế với các cấu trúc mô phỏng hông, mắt cá và bàn chân của chim, nhưng đơn giản hơn so với hệ thống giải phẫu phức tạp của loài chim thật.
Các nhà khoa học cho biết, trong các thử nghiệm, Raven đã cất cánh bằng cách nhảy lên tương tự như loài chim.
Nhóm nghiên cứu đã sử dụng các mô phỏng trên máy tính để tính toán chuyển động và tốc độ của chân cần thiết để Raven có thể cất cánh thành công.
Theo nghiên cứu, được công bố trên tạp chí Nature ngày 04/12, việc đồng bộ hóa chuyển động của chân nhảy và cánh quạt phía trước đã giúp robot Raven nhanh chóng chuyển sang chế độ bay.
Theo các nhà khoa học, Raven đạt tốc độ cất cánh khoảng 2,4 mét/giây, tương đương với các loài chim có khối lượng cơ thể tương tự.
Thiết kế mới này đóng góp đáng kể vào tốc độ cất cánh của robot và được đánh giá là tiết kiệm năng lượng hơn so với các robot cất cánh mà không sử dụng lực nhảy.
Cấu trúc chân mới của Raven cũng cho phép thực hiện nhiều chuyển động đa dạng như đi bộ, nhảy qua khe hở hay nhảy lên chướng ngại vật. Trong các thử nghiệm, chân nhảy của Raven giúp robot đạt độ cao cất cánh khoảng 0,4 mét, giúp vượt qua các chướng ngại vật trên mặt đất.
Theo các nhà nghiên cứu, chiến lược nhảy này cho phép thiết bị bay không người lái (drone) cất cánh trong nhiều điều kiện khác nhau với tốc độ khởi đầu cao hơn, từ đó tạo ra một quá trình cất cánh ổn định hơn.
Với việc tối ưu hóa thiết kế chân của Raven có thể là nguồn cảm hứng cho việc phát triển các loại robot đa năng với nhiều chế độ di chuyển hơn.
Nghiên cứu này được kỳ vọng sẽ mở ra hướng đi mới cho việc phát triển các máy móc linh hoạt hơn, hiệu quả về năng lượng và có khả năng hoạt động trong địa hình phức tạp.

